


EASYV1.00嵌入式PLC的基本原理(一)
2005/7/4 12:02:00
一、嵌入式PLC概念 嵌入式PLC是指在特定的控制装置中实现PLC(Programable Logic Controller)编程语言的解释、执行,使特定装置在自身专用功能基础上具有PLC的基本功能。 PLC编程语言(又称梯形图语言)是一种面向工厂自动化工人师傅的语言,具有简洁、直观,面向工艺流程等许多优点。PLC编程语言的出现使控制装置中的硬件管和面向控制流程分离,PLC制造商专注于硬件及硬件管理,工厂自动化人员借助梯形图语言作二次开发,使同一种PLC适用于不同的控制系统中,形成了可编程逻辑控制器(PLC)这种概念级产品。 但控制产品的设计已发展到一个追求个性化、差异化设计的阶段。常规PLC无法进入的市场,面临更多的是个性化、差异化的压力,如成本控制、特殊功能等。出现了工控机(IPC)、单片机嵌入板与更贴近个性化需求的控制产品。IPC在互连、表达、算法等方面优势明显,单片机系统在成本控制上更加灵活。IPC由于加载了操作系统(如NT)其实时性、稳定性难以满足连续控制的苛刻要求。更适合于监控,低层通常用PLC;单片机系统将硬件管理和用户工艺流程控制混在一起,制约了它的标准化,并最终失去成本竞争优势。 嵌入式PLC正是面向IPC和单片机系统开发的,它保留了PLC(借助梯形图语言)硬件管理和工艺控制分离的优势,结合IPC和单片机提供的更个性化、差异化的设计方法,形成一种新的控制器设计理念。当我们在IPC中嵌入PLC的功能时,我们称之为基于PC Base的嵌入式PLC,当我们在单片机中嵌入PLC功能时,我们称它为基于All ON One的嵌入式PLC(片级嵌入PLC)。来特别说明时,嵌入式PLC指片级嵌入式PLC,以下描述以科威公司EASY V1.00嵌入式PLC为例。 二、嵌入式PLC软件架构 1、总体结构 EASY V1.00嵌入式PLC是一种实时性很强的操作系统软件,总体结构包括三个层面。 ①嵌入式PLC内核 它完成实时任务调度,梯形图语言解释、执行、通讯等基本功能,并提供二次开发驱动接口; ②二次开发程序 通过内核提供的外挂任务,使用内核开发各种面向具体对象个性化差异化的驱动程序; ③终端应用程序 指面向工艺流程控制的梯形图语言编程;  EASY V1.00总体结构
EASY V1.00总体结构 EASY V1.00并发任务实时数据
EASY V1.00并发任务实时数据
EASY V1.00总体结构EASY V1.00并发任务实时数据



 投诉建议
投诉建议
提交
查看更多评论
其他资讯

【KEWEI】科威单板智能伺服在织带收卷机上的应用

【KEWEI】科威产品选型册
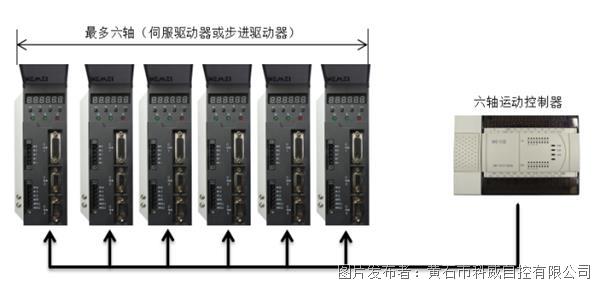
科威六轴运动控制器的特点及功能

科威电机,快速门中的“智能机”

科威触摸屏PLC一体机组态软件